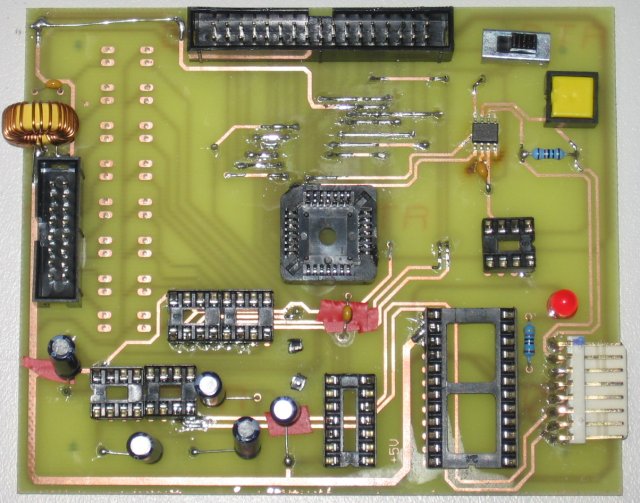
Bis auf ein paar Schönheitsoperationen ist die Hardware für meine Diplomarbeit so gut wie fertig. Jedenfalls die Basisplatinen und die Sensoren sind schon fertig. Das Board für den Mikrocontroller werde ich nachher noch durchtesten und dann mit den noch fehlenden ICs bestücken. In die 8 leeren Sockel links neben der Pfostenwanne kommen noch ein paar N-MOS FETs im DIL Gehäuse rein, die als Lowsideschalter der Kollisionsbumper dienen.
Ich bin leider keine geübte Bestückungsmaschine und für einen Lehrberuf wär die Ausführung wohl unterdurchschnittlich. Aber ich sehe meine Prioritäten nicht im schönen Verlöten, sondern darin, ein funktionsfähiges System zu entwerfen 
Oberseite Mikrocontrollerboard
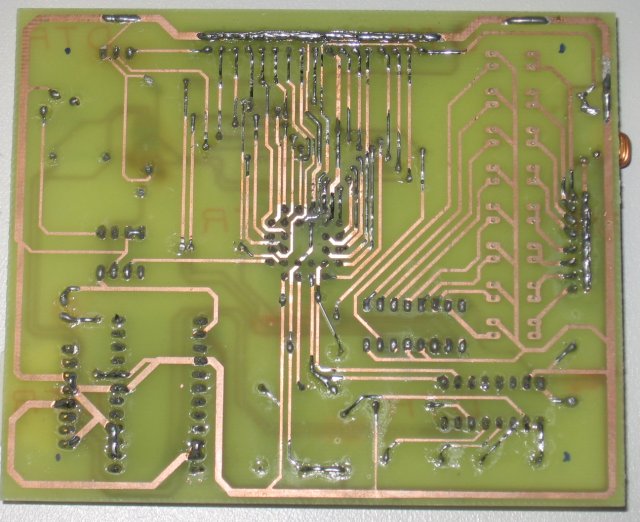
Unterseite Mikrocontrollerboard:
Und schließlich die Roboterfinger mit Griffkontakten und Lichtschranken (im Bild nicht zu sehen, da im Finger eingelassen):

Die Finger hat übrigens mein Professor selber gebastelt, und er hatte auch noch mächtig Spaß dabei